At the end of this page, you can find the full list of publications.
Highlights
A novel approach for mapping and localization in dynamic indoor environments, enhancing SLAM performance through adaptive multimode techniques.
Z. Lin, Q. Zhang, Z. Tian, P. Yu, Z. Ye, H. Zhuang, J. Lan
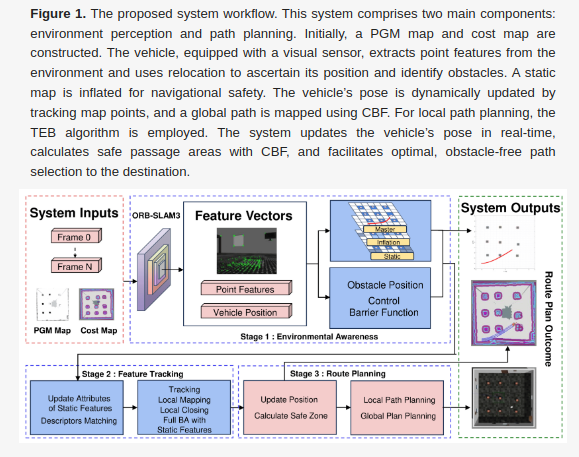
Presents an advanced Visual SLAM system optimized for safe navigation in lightweight autonomous vehicles, ensuring collision avoidance in complex environments.
Z. Lin, Z. Tian, Q. Zhang, H. Zhuang, J. Lan
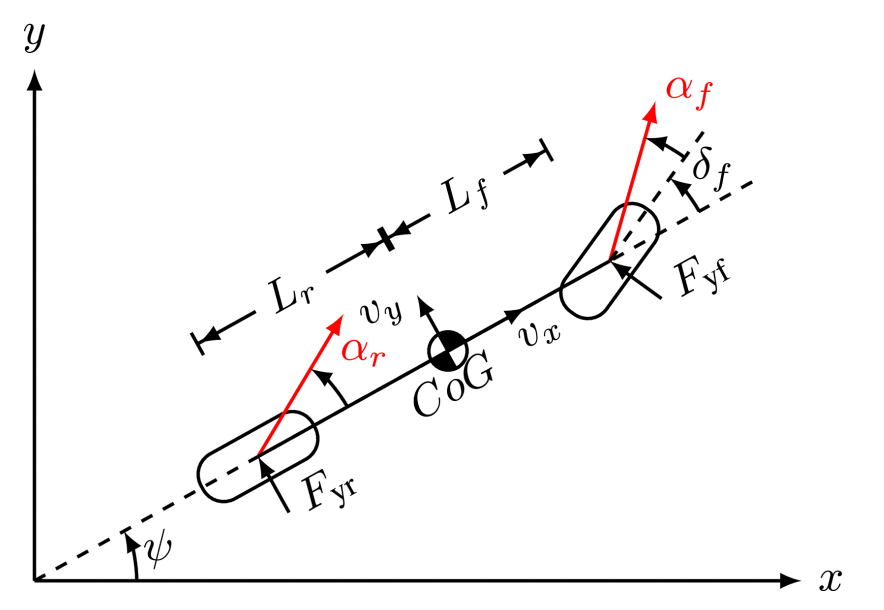
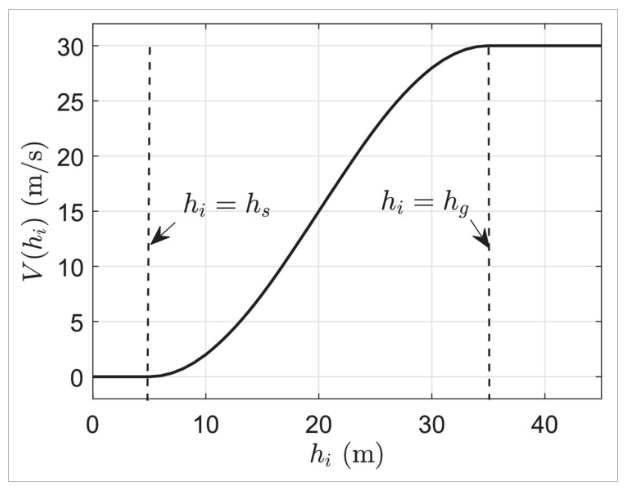
Introduces a data-driven approach to enhance adaptive cruise control in complex, nonlinear vehicle platoons for improved safety and efficiency.
J. lan
IET Intelligent Transport Systems, 2024
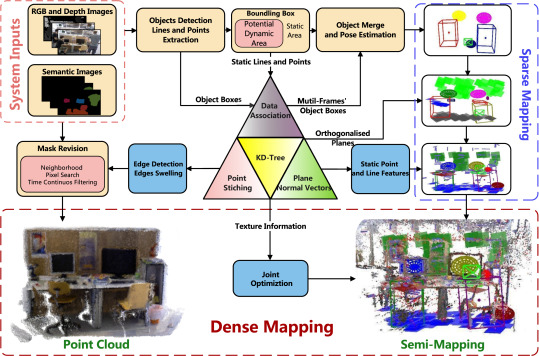
This paper enhances Point-Line SLAM by integrating dense semantic data for improved accuracy in dynamic environments.
Zhihao Lin, Qi Zhang, Zhen Tian, Peizhuo Yu, Jianglin Lan
Presents a comprehensive planning approach for automated driving that accounts for safe interactions with human drivers.
Harikirshnan Vijayakumar, Dezong Zhao, Jianglin Lan, Wenjing Zhao, Daxin Tian, Dachuan Li
IEEE Transactions on Intelligent Vehicles, 2023
![]()
Proposes a real-time framework for vehicle tracking using multiple cameras, improving accuracy and robustness in dynamic environments.
Hanyang Zhuang; Xingyuan Chen; Jianglin Lan; Ying Wang; Zhaoxuan Lu; Chunxiang Wang
2024 IEEE International Conference on Real-time Computing and Robotics
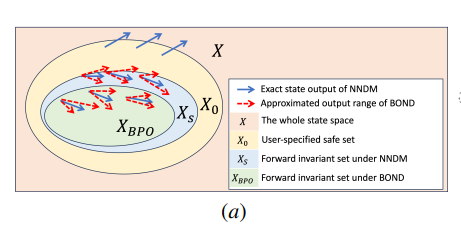
This paper presents a method for ensuring safe real-time control of dynamic models using neural networks with robust approximation techniques.
Hanjiang Hu, Jianglin Lan, Changliu Liu
Proceedings of Machine Learning Research vol 242:92–103
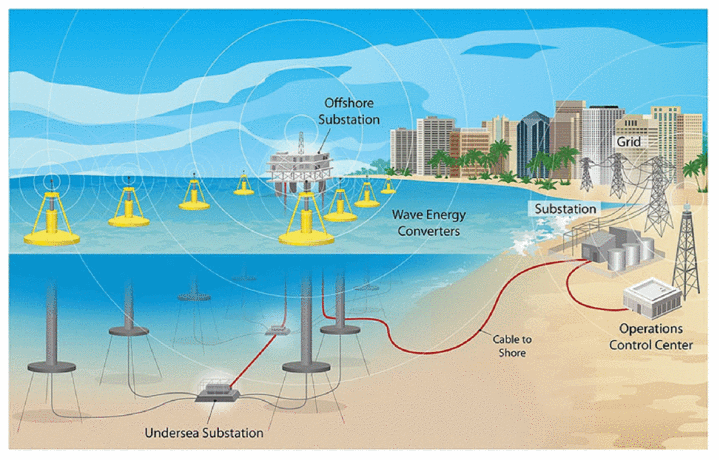
Introduces a distributed control strategy aimed at maximizing energy extraction from an array of wave energy converters.
S. Zhan, Y. Chen, J. Lan, and Y. Zhang
2024 UKACC 14th International Conference on Control
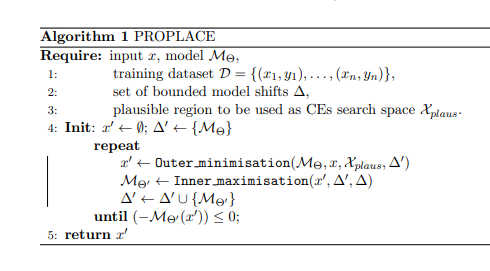
Proposes a method for generating robust and plausible counterfactual explanations for neural networks using robust optimization techniques.
J. Jiang, J. Lan, F. Leofante, A. Rago, and F. Toni
Proceedings of the 15th Asian Conference on Machine Learning, 2024
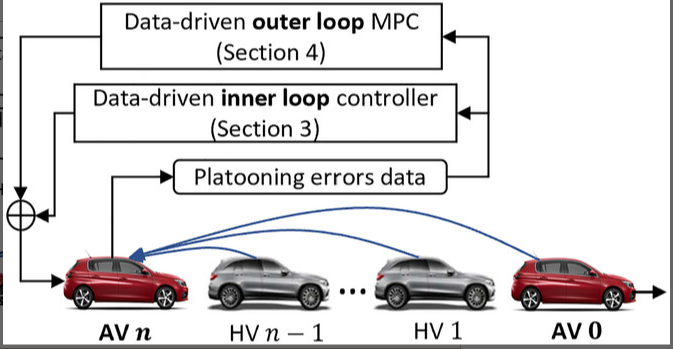
This paper presents a data-driven dual-loop control strategy for platooning, addressing the integration of human-driven and automated vehicles in the same platoon.
Jianglin Lan
IET Intelligent Transport Systems, 1–10, 2023

This paper explores the determination of optimal Linear Quadratic Regulator (LQR) weights to ensure a common solution to the associated Riccati equations.
J. Lan, D. Zhao
IEEE Transactions on Automatic Control, 68(10) 6393–6400, 2023
Presents a framework for real-time safety monitoring and alerting in control systems powered by neural networks.
Jianglin Lan
IFAC Word Congress, IFAC-PapersOnLine, 56(2), 9436-9441, 2023
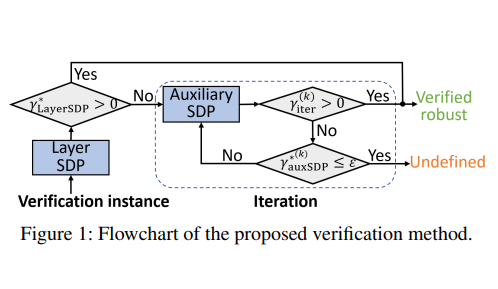
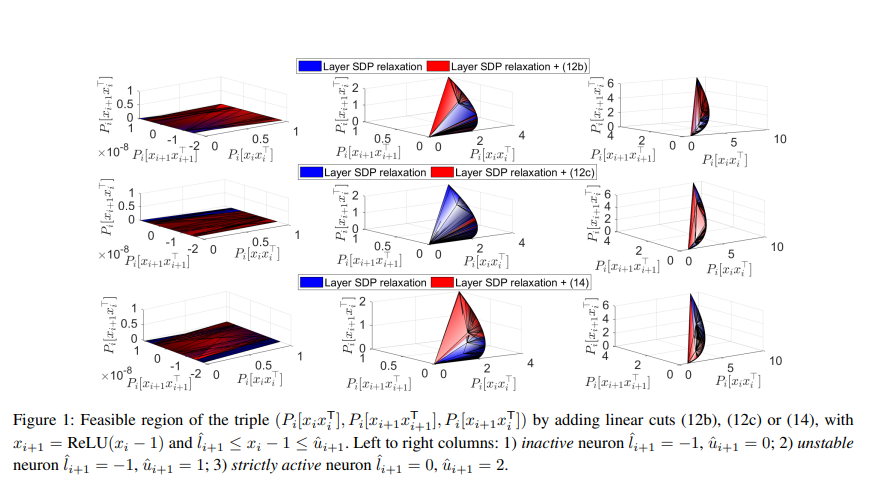
This paper introduces an iterative approach using semidefinite relaxations to improve the efficiency and accuracy of neural network verification.
Jianglin Lan, Yang Zheng, Alessio Lomuscio
Proceedings of the AAAI Conference on Artificial Intelligence, 37(12), 14937-14945, 2023
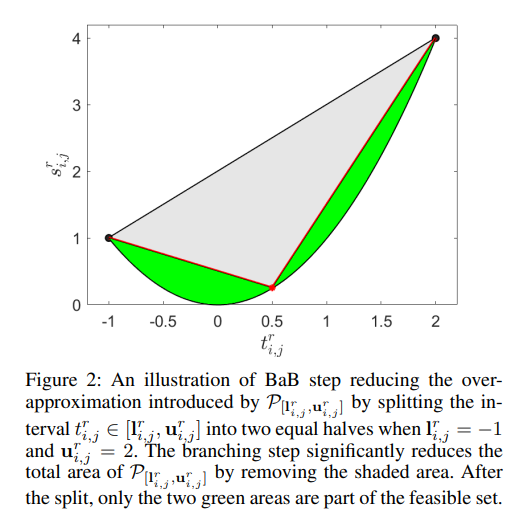
Proposes a branch-and-bound method using semidefinite relaxation to achieve tighter and more reliable neural network verification.
Jiaglin Lan, Benedikt Bruckner, Alessio Lomuscio
Proceedings of the AAAI Conference on Artificial Intelligence Vol. 37 No. 12, 2023
This paper develops a cooperative control policy for mixed vehicle platoons, emphasizing safety and robustness in data-driven approaches.
Jianglin Lan, Dezong Zhao, Daxin Tian
International Journal of Robust and Nonlinear Control, 33(7), 4171–4190, 2023
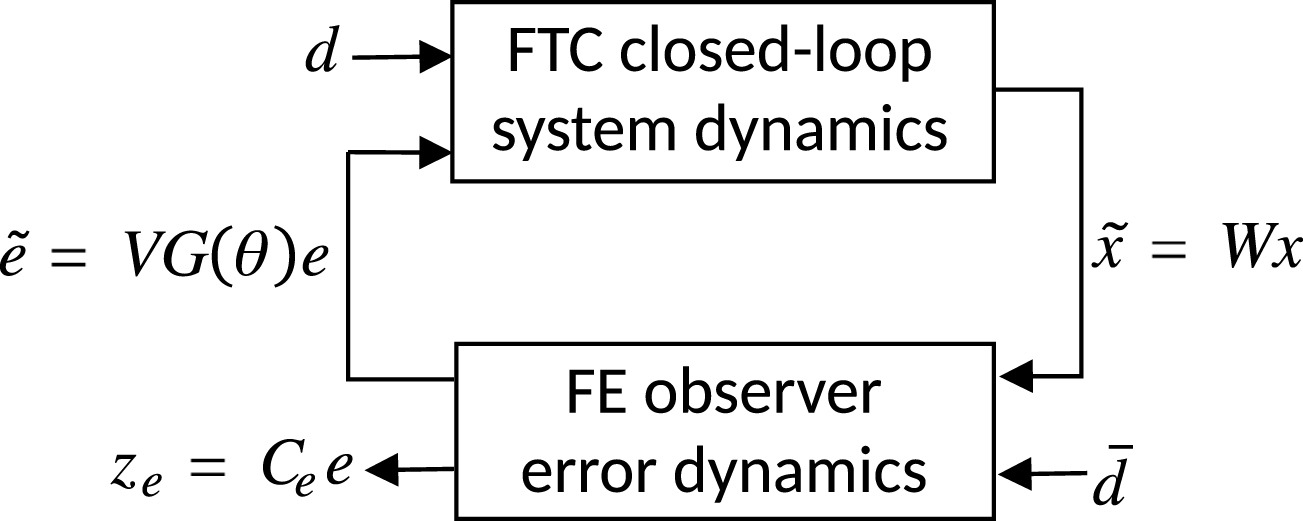
Presents an iterative approach to enhance fault estimation and integrate fault-tolerant control, improving system resilience.
Jianglin Lan, Ron Patton
Automatica, Volume 145, 110556, 2022
Presents an iterative approach to enhance fault estimation and integrate fault-tolerant control, improving system resilience.
Jianglin Lan, Yang Zheng, Alessio Lomuscio
Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 36 No. 7, 2022
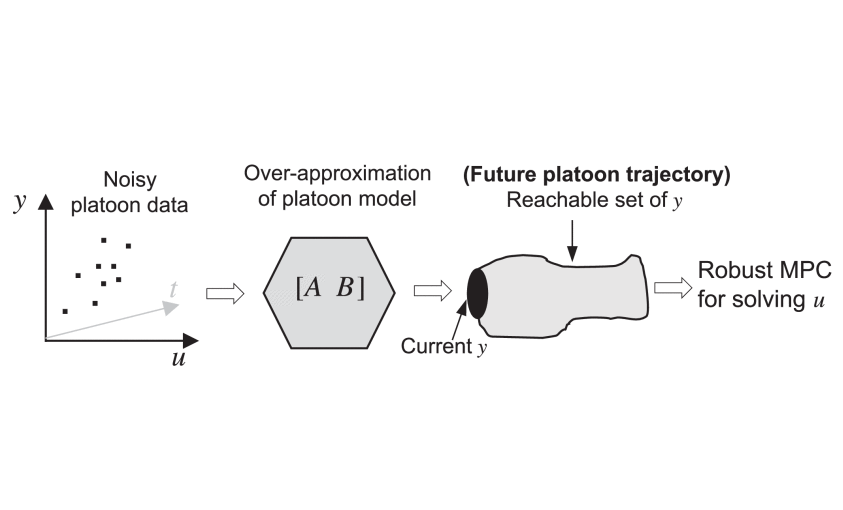
This paper develops a robust predictive control strategy for mixed vehicle platoons, focusing on handling noisy measurements for improved performance.
Jianglin Lan, Dezong Zhao, Daxin Tian
IEEE Transactions on Intelligent Transportation Systems, 24(6) 6586 – 6596, 2021
Full List of publications
SLAM2: Simultaneous Localization and Multimode Mapping for indoor dynamic environments
Z. Lin, Q. Zhang, Z. Tian, P. Yu, Z. Ye, H. Zhuang, J. Lan
Pattern Recognition, 2025
Enhanced Visual SLAM for Collision-Free Driving with Lightweight Autonomous Cars
Z. Lin, Z. Tian, Q. Zhang, H. Zhuang, J. Lan
Sensors, 2024
Data-driven cooperative adaptive cruise control for unknown nonlinear vehicle platoons
J. lan
IET Intelligent Transport Systems, 2024
DPL-SLAM: Enhancing Dynamic Point-Line SLAM through Dense Semantic Methods
Zhihao Lin, Qi Zhang, Zhen Tian, Peizhuo Yu, Jianglin Lan
IEEE Sensors Journal, 2024
A Holistic Safe Planner for Automated Driving Considering Interaction with Human Drivers
Harikirshnan Vijayakumar, Dezong Zhao, Jianglin Lan, Wenjing Zhao, Daxin Tian, Dachuan Li
IEEE Transactions on Intelligent Vehicles, 2023
A Real-time Framework of Multi-Camera Vehicle Tracking System
Hanyang Zhuang; Xingyuan Chen; Jianglin Lan; Ying Wang; Zhaoxuan Lu; Chunxiang Wang
2024 IEEE International Conference on Real-time Computing and Robotics
Real-time safe control of neural network dynamic models with sound approximation
Hanjiang Hu, Jianglin Lan, Changliu Liu
Proceedings of Machine Learning Research vol 242:92–103
Energy Maximisation Control for an Array of Wave Energy Converters - A Distributed Approach
S. Zhan, Y. Chen, J. Lan, and Y. Zhang
2024 UKACC 14th International Conference on Control
Provably Robust and Plausible Counterfactual Explanations for Neural Networks via Robust Optimisation
J. Jiang, J. Lan, F. Leofante, A. Rago, and F. Toni
Proceedings of the 15th Asian Conference on Machine Learning, 2024
Data-driven Dual-loop Control for Platooning Mixed Human-driven and Automated Vehicles
Jianglin Lan
IET Intelligent Transport Systems, 1–10, 2023
Finding the LQR Weights to Ensure the Associated Riccati Equations Admit a Common Solution
J. Lan, D. Zhao
IEEE Transactions on Automatic Control, 68(10) 6393–6400, 2023
Safety Monitoring and Alert for Neural Network-Enabled Control Systems
Jianglin Lan
IFAC Word Congress, IFAC-PapersOnLine, 56(2), 9436-9441, 2023
Iteratively Enhanced Semidefinite Relaxations for Efficient Neural Network Verification
Jianglin Lan, Yang Zheng, Alessio Lomuscio
Proceedings of the AAAI Conference on Artificial Intelligence, 37(12), 14937-14945, 2023
A Semidefinite Relaxation based Branch-and-Bound Method for Tight Neural Network Verification
Jiaglin Lan, Benedikt Bruckner, Alessio Lomuscio
Proceedings of the AAAI Conference on Artificial Intelligence Vol. 37 No. 12, 2023
Safe and Robust Data-Driven Cooperative Control Policy for Mixed Vehicle Platoons
Jianglin Lan, Dezong Zhao, Daxin Tian
International Journal of Robust and Nonlinear Control, 33(7), 4171–4190, 2023
An Iterative Strategy for Robust Integration of Fault Estimation and Fault-Tolerant Control
Jianglin Lan, Ron Patton
Automatica, Volume 145, 110556, 2022
Tight Neural Network Verification via Semidefinite Relaxations and Linear Reformulations
Jianglin Lan, Yang Zheng, Alessio Lomuscio
Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 36 No. 7, 2022
Data-Driven Robust Predictive Control for Mixed Vehicle Platoons using Noisy Measurement
Jianglin Lan, Dezong Zhao, Daxin Tian
IEEE Transactions on Intelligent Transportation Systems, 24(6) 6586 – 6596, 2021